vs Cloud
The Cloud here is the reference object for the inspection.
Note
In cloud/cloud inspection, the colored object is the one which is projected (the second selected).
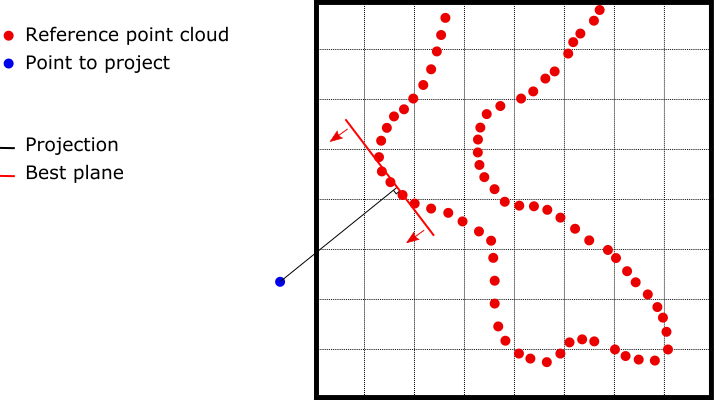
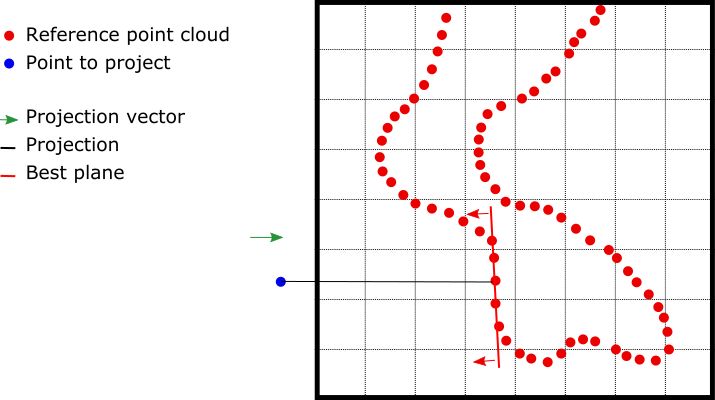
Each point is projected in the direction of the local normal of the cloud on a local plane. In other words, the "distance" is not the closest distance to a point of the target cloud, but the closest distance to a local plane of the target cloud. According to the different options, this local plane is selected as detailed below:
|
|
|
|
Scanning direction information and accuracy
The two inspected point clouds must include scanning direction information to potentially display positive and negative deviation values after the analysis. If not, the deviation value is absolute.
This method is more optimized on dense point cloud without too much noise. The accuracy of this type of inspection might be lower for noisy point clouds or point clouds containing few points and/or too much sparse points. In this case, it is better to create at least one surface (e.g.: mesh) as the reference model to perform the comparison.