Calibrate Camera
![]()
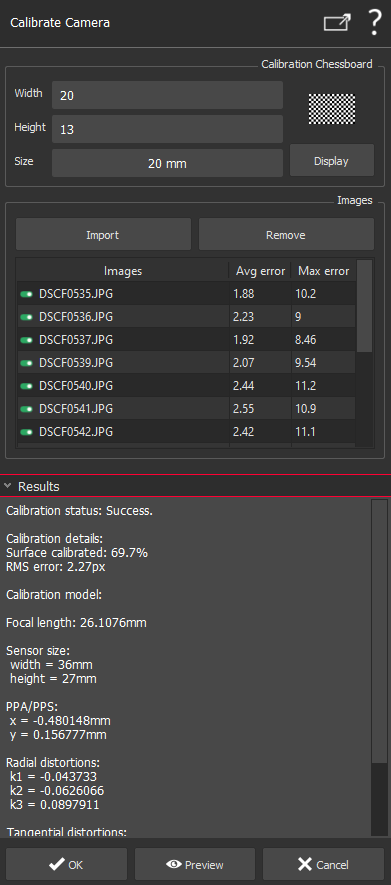
This command consists in using chessboard images to calibrate the camera. Calibrating camera means to compute internal parameters of the camera. These parameters describe geometric elements of the camera and can then be used to texture automatically a photo taken from the same camera:
physical Size of sensor, in millimeters
size of a pixel on sensor in millimeters
focal length in millimeters
PPS: Principal Point of Symmetry, center of radial distortions. This point is relative to the center of sensor
radial distortions. Distortions represent geometric defects
The computation needs at least 3 pictures of a chessboard. On each image, the chessboard must be completely visible. All the images have to be taken by the same camera using the same focal length.
No selection required to launch the command.
|
|
In order to calibrate your camera:
You can activate/deactivate an image by using the icone next to the image name. Textual results
Saving the calibration results: the OK button is available when a calibration is done, but not available if an image is added or a point deleted: a new calibration has to be done by clicking on the Preview button to activate the OK button.
|