
This function allows you to estimate the position and orientation of a picture coming from a camera.
Select the image whom attitude has to be computed.
This command doesn't work with ortho images.
|
|
The view is automatically split into two parts (multiview) in order to have the mesh to texture on the left and the current selected texture on the right.
The Reference points tab allows you to calculate the unknown data:
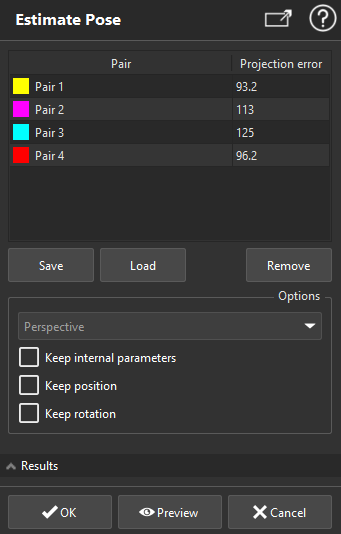
In this tab, you need to enter couples of points (image, surface) so that Leica Cyclone 3DR calculates the unknowns.
As soon as a couple of points is defined, you will see a new entry inside the list.
You can Save your list of reference points to an external file. To read an external file containing a reference point list, you must use the Load button.
Note
The ASCII format used to store these points is; one point per line: X Y Z U V I J K Name
Where X, Y and Z are the coordinates of the point in the 3D scene, U V are the coordinates of the point on the image (between 0 and 1 - 0/0 being the top left of the image and 1/1 being the bottom right), I J K define the vector from which the points are clicked (not used as soon as the number of points is greater than 2) and the name being the name of the point.
The minimum number of pairs necessary to get a result depends on the type of image:
2 for perspective image
3 for spherical image
4 for fish eye image
However, with the minimum number of points only and without any previously known parameters, the result may not be accurate. For example, you have to add at least 4 pairs to get a true result (perspective image). Furthermore, Leica Cyclone 3DR can automatically compute lens distorsions by adding pairs.
As soon as camera parameters have been worked out, the image will be displayed in perspective mode.
|
Note
During the input of points with the Reference points tab, the Camera definition tab is automatically updated. However, as the internal camera geometry is unknown, the software cannot accurately calculate the different values. This is the reason why the software recalculates the internal camera geometry with a CCD diagonal length of 43.27mm. This value is the diagonal of a rectangle 24x36mm, which is the standard film size of the argentic cameras.
Select Keep Internal Parameters if you want to keep the INCAM internal camera definition (Calibrate Camera).
Note
The tangential distortions are not estimated during the computation.