
This command aligns the selected objects using N pairs of points (called mobile and fixed points) and computes the transformation that minimizes the distance between each mobile point and the corresponding fixed in a least squares sense.
Select the object(s) to move and launch the command.
|
|
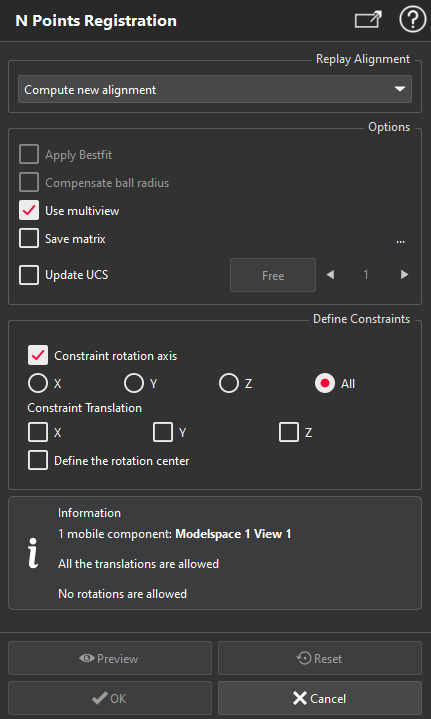
You can choose to replay the last best align or the last reverse align,
or you can click the point pairs to compute a new alignment. For more information on defining points, you can refer to Define points. You have the possibility to click point pairs one after another, click all starting points first or all target points first (press DEL key to remove the last clicked point).
Optionally, the command can directly apply a Best Fit after the alignment. The option is only available if the mobile element (selected when entering the alignment) is "legal" for best fit (refer to Best Fit Registration) and all fixed points are on the same "legal" component.
Optionally, you can make a Ball radius compensation and enter a radius value. The option is only available if all target points are on a mesh or surface.
The multiview option splits the screen in 2 parts: on the first screen you have the moving components and on the second screen you have the fixed components.
You can add some constraints to the alignment:
Rotations. You can:
Constraint the X axis: the rotation will only be around the X axis, no rotation around Y and Z.
Constraint the Y axis: the rotation will only be around the Y axis, no rotation around X and Z.
Constraint the Z axis: the rotation will only be around the Z axis, no rotation around X and Y. If Z is the correct vertical in all your objects, the vertical will still be correct at the end of the alignment.
Constraint all axis: the alignment will only be a translation.
Translations: you can disable each translation (along X, Y or Z) by checking the corresponding option.
You can define the rotation center (by default it's (0, 0, 0)).
If the "best-fit" option is selected, the same constraints will be applied to the best-fit.
Optionally, you can Preview to see if the result is correct.
When you Preview, you will have a label for each couple of points in order to show you the distance between the starting point and the end point.
If you click on the button Reset, it's possible to disable one or several couples by clicking the corresponding label (the symbol will be grey). To enable a disabled couple, you just have to click again on the label. The next compute will not take in account disabled couples.
Validate the command with OK, or, close the dialog box with Cancel.
Information about transformation: when the transformation(s) have been computed, the command gives you information about the movement of all the selected objects. In the result window, you can see a detailed listing of transformations applied to the different objects inside the selection, which the define of the 6 degrees of freedom:
Rotation around the X axis: Roll.
Rotation around the Y axis: Pitch.
Rotation around the Z axis: Yaw (or heading).
Translation along X.
Translation along Y.
Translation along Z.
Note
The 3 rotations are also called "Euler angles". Here, the angles are assumed to be applied in order Z->Y->X such that R = Rx.Ry.Rz, which is the most common convention. In addition the command finds the point of the model having the greatest movement and tells you this distance, which is greater than all other points of the model.
|