Exercise: Clean a cloud using automatic filters
The software provides several automatic filters in order to clean up a point cloud and remove noisy points.
Automatic Filter: Noise
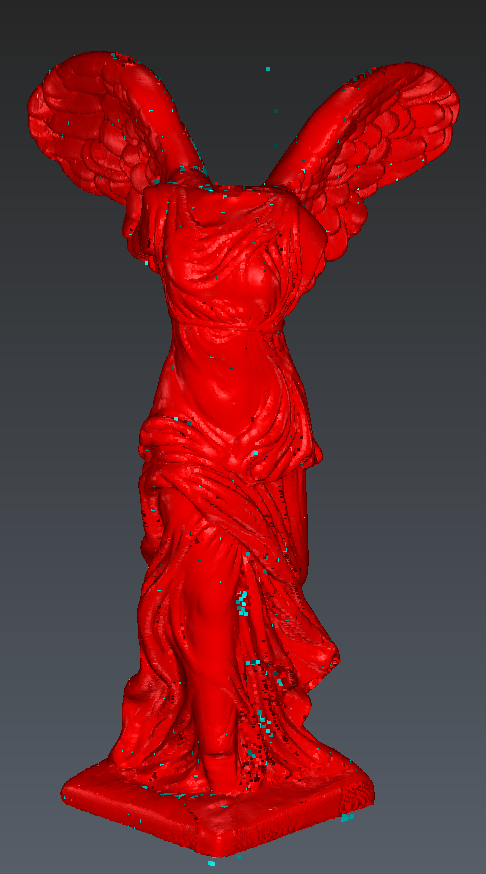
Open the file Victory.3dr
This file contains 2 point clouds, one with noise, and one already filtered. Show only and select the cloud named “Victory + noise” and go to Noise.
If the goal is to delete sparse points inside the cloud, don't check the Noisy points option.
The points involved are highlighted and displayed in a different color. You can adjust the slider to remove more or less points. In this example, we can put the intensity to 80 in order to remove points which are in fact measurement errors (blue points in the picture).
Information appear in the dialog box to notify you how many points will be deleted.
Note
In order to work correctly, this filter requires a point cloud with a regular density.
 Remove noisy points in a cloud
Remove noisy points in a cloud
Automatic Segmentation: Distance
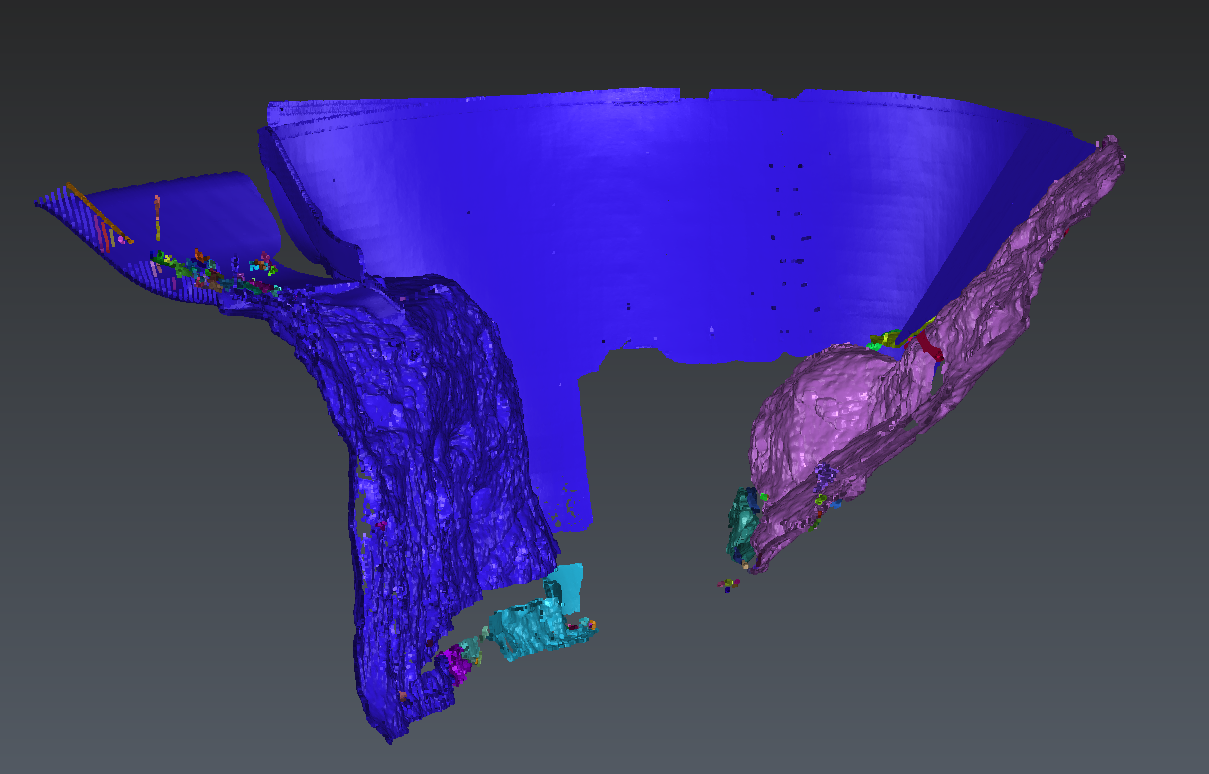
Open the file CleanPointCloud.3dr
This file contains the point cloud of a dam having noisy and undesired parts.
Select the cloud named “DamRock” and go to Distance.
Use this filter in order to split the cloud in smaller clouds and isolate the part of the dam. The cloud is split according to the maximum distance between points. This distance also corresponds to the minimum distance between sub clouds.
The initial value is computed according to the average density of the cloud. For a first test, you can let it by default and preview the result.
Then, you can change Segmentation distance value to fit your needs. Set the parameter to 0.4 m. You can delete automatically the small clouds with the option Filter small sub-clouds of less than 10 points. Click on Preview to preview the results and OK to validate them.
Check the displayed results: Cloud has been exploded into 898 sub-clouds. Then, 789 sub-clouds have been deleted.
 Explode a cloud with a distance criterion
Explode a cloud with a distance criterion
All the kept sub clouds are added into the Cloud Group and ordered from biggest to smallest regarding their number of points.
If the cloud is exploded in more than 1000 parts, the smallest will automatically be deleted in order to keep only the 1000 biggest sub clouds.